



端到端多模态传感数据训练
多场景多任务自主训练
0学习成本成为数据采集员
支持MPC/DRL

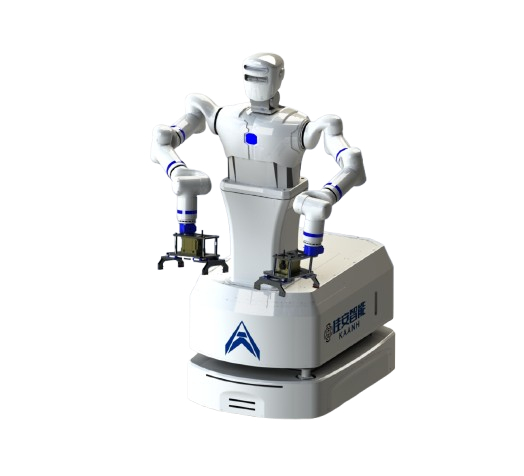
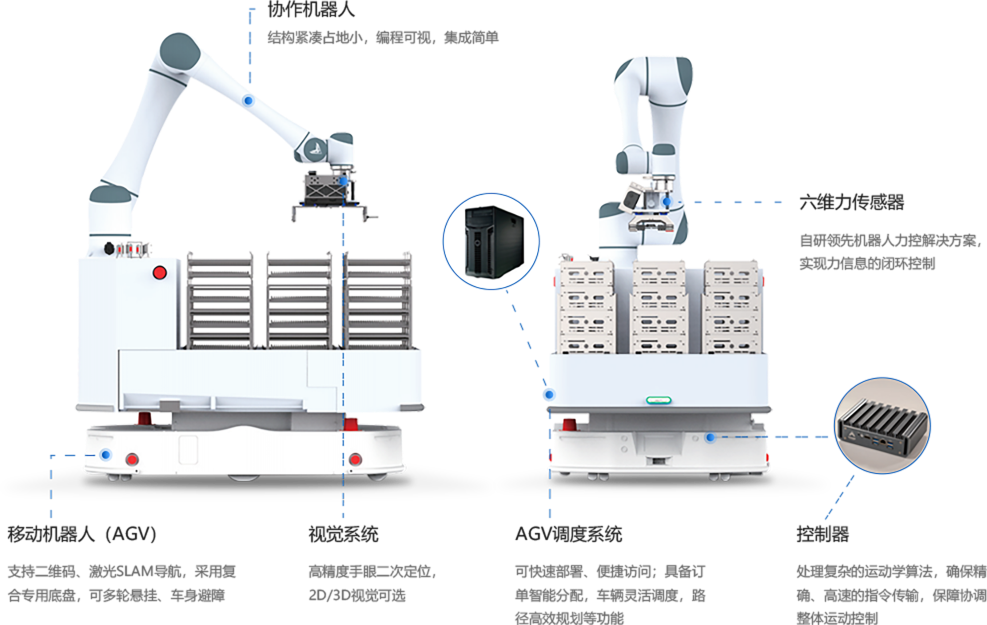
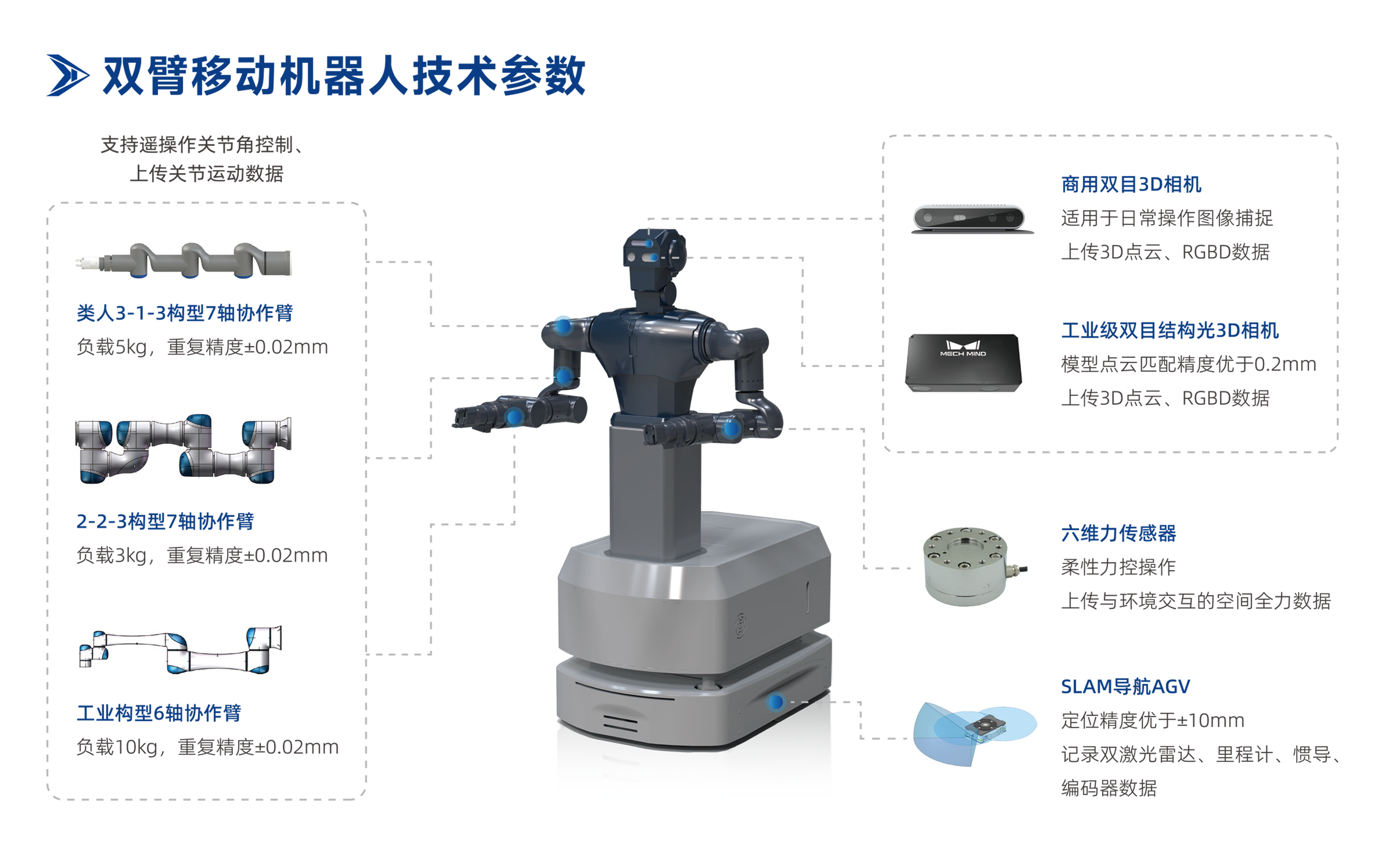
佳安智能视觉力控复合机器人高度集成了协作机器人、AGV、视觉、力控等核心模块,可以实现移动、识别、抓取等功能,使得机器人具备高效灵活的“手、眼、脑、脚”等综合能力,在晶圆盒,弹夹,Tray盘,CNC机加件等高精度产品加工领域,可以有效实现不同物料或治具在不同工序设备之间的转运和上下料,并实时追溯生产信息,提高生产效率。





如果您有产品和服务方面的需求,请与我们联系
 联系电话
联系电话
 联系邮箱
联系邮箱
cooperate@kaanh.cn
地址:深圳市南山区桃源街道崇文花园4号办公楼10楼1018房
地址:上海市闵行区中春路1288号 金地威新科创园2号楼东1-2楼


版权所有 © 深圳市南科佳安机器人科技有限公司
技术支持:澳煦互动